|
I work on JAX at Google. I completed my PhD in Autonomous Systems Lab (ASL) at Stanford University, on differentiable optimization applied to behavior inference in autonomous driving. Email / Resume / Bio / Google Scholar / Github |

|
Here are some articles I (co)authored showcasing some of the projects I worked on. |

|
Robert Dyro Ragged dot operator is often used to implement a mixture-of-experts (MoE) layer. Here's one way to do it efficiently on modern accelerators with a focus on TPUs. |

|
Robert Dyro Flash Attention and Ragged Dot in Pallas-Triton for Ampere GPUs, and kernel auto-tuning. |

|
Robert Dyro Open-source Deepseek R1 inference using JAX, minimal yet performant. |

|
Robert Dyro An attempt to improve the inference speed of HuggingFace's implementation of Mistral-7B in JAX for RTX 3090 via Pallas kernel tuning. |
|
|
Robert Dyro, Ed Schmerling This set is puzzles is meant to teach you how to use Pallas from first principles in an interactive fashion. Adapted from Sasha Rush's Triton-Puzzles. |
|
Robert Dyro Post-training reduction of quantized NN memory footprint via SVD. |
|
|
Robert Dyro A package for efficiently wrapping existing PyTorch code as JAX functions in a JIT-compatible way. AutoDiff gradients can be automatically defined, fully integrating any PyTorch code with JAX differentiation. |
|
|
Robert Dyro Automatic short answer grading with pretrained language models. |

|
Robert Dyro, Rohan Sinha Controlling an airplane using optimal control with tuned objective parameterization using ray.tune. |
|
|
Robert Dyro, Ricky Grannis-Vu An introduction to GraphGym and an extension of GraphGym to perform Neural Architecture Search (NAS). |
|
Robert Dyro, Spencer Richards A small summary of some of JAX's techniques we found particularly interesting in our work and research. A collection of a few disjoint topics. |
|
|
Robert Dyro, Somrita Banerjee Optimizing Models for Fairness and Explainability via Shapley value and local linear model penalization and differentiation. |

|
Robert Dyro, Ed Schmerling Optimization sensitivity analysis with PyTorch and JAX. |

|
Robert Dyro A QP solver fitting into a single CUDA block. |

|
Robert Dyro Reverse-mode automatic differentiation with full sparse Jacobians and Hessians. |

|
Robert Dyro, James Harrison Model Predictive Control - general and consensus optimization in Julia & Python. |
I'm interested in optimization, robotics, optimization, and machine learning. My research is about creating new models and algorithms for robotic systems that exploit known structure of the problem. |
|
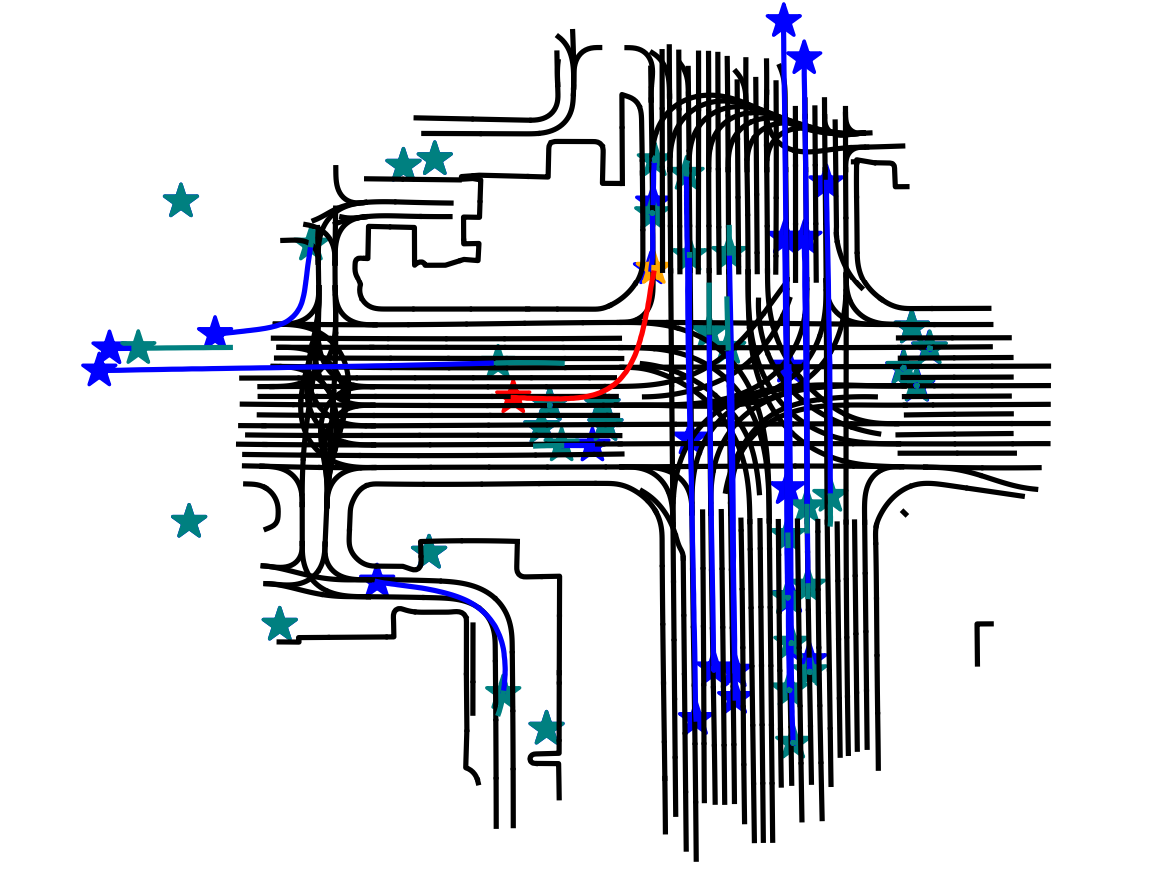
Robert Dyro, Matthew Foutter, Ruolin Li, Luigi Di Lillo, Edward Schmerling, Xilin Zhou, Marco Pavone International Conference on Robotics and Automation (ICRA), 2025 Extracting learned behavior distribution for realistic counterfactual generation via efficient and scalable Hessian sketching. |
|
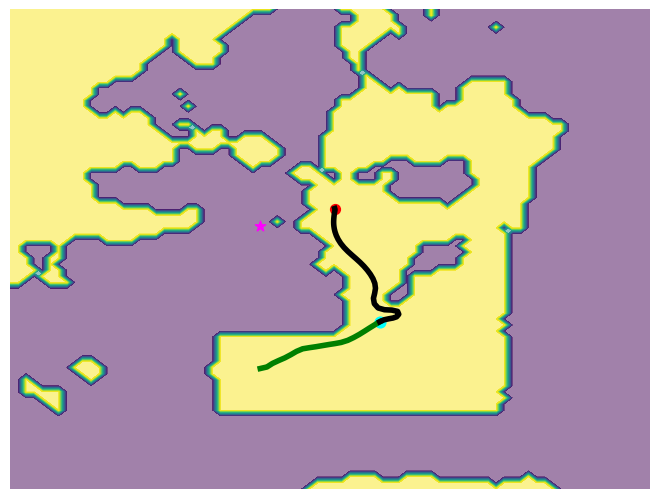
Gadiel Sznaier Camps, Robert Dyro, Marco Pavone, Mac Schwager arXiv, 2022 Optimal planning & control in new environments can be done effectively by learning deep signed distance function (SDF) maps from LiDAR data. |
|
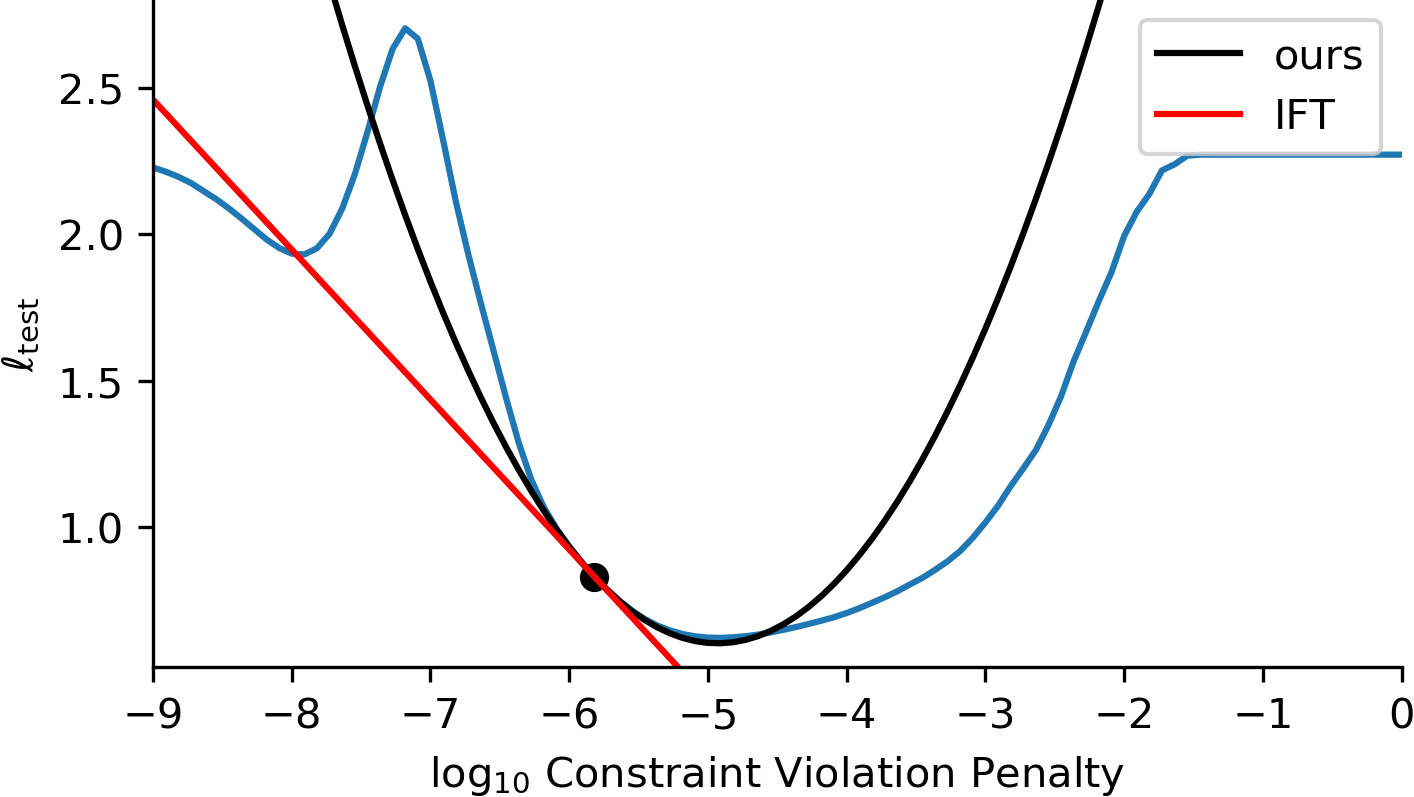
Robert Dyro, Edward Schmerling, Nikos Arechiga, Marco Pavone Artificial Intelligence and Statistics (AISTATS), 2022 Differentiating through optimization can be done twice to obtain bilevel program Hessians. |
|
Robert Dyro, James Harrison, Apoorva Sharma, Marco Pavone IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021 Sampling arbitrary dynamical uncertainty and then optimization over the possibilities <em>jointly</em> gives safe real-time optimal control. |
|
Website template borrowed, with permission, from Jon Barron. |